







Salah satu langkah untuk mengurangi terjadinya ledakan bom adalah menjinakkan bom tersebut. Namun pekerjaan menjinakkan bom adalah salah satu pekerjaan yang memiliki risiko tinggi dimana sewaktu-waktu bom tersebut dapat meledak, oleh karena itu untuk mengurangi resiko jatuhnya korban jiwa diperlukan sebuah security robot yang dapat menggantikan tugas manusia.ndonesia termasuk salah satu negara yang mengembangkan penelitian dibidang security robot melalui LIPI (Lembaga Penelitian Indonesia). Salah satu robot yang telah dikeluarkan oleh LIPI adalah Morolipi (Mobil Robot Penjinak Bom LIPI). Robot ini memiliki tiga tungkai berwarna hitam masing-masing sepanjang 70 cm yang tertanam dalam sebuah badan logam seberat 80-100.
Dibawah ini dapat dilihat gambaran dari kontrol robot penjinak bom yang menggunakan software dari Visual Basic 6.0

Gambar1. Disain pembutan software dengan VB.6.0
 Gambar2. Pembuatan source code kontrol dengan VB.6.0
Gambar2. Pembuatan source code kontrol dengan VB.6.0
 Gambar3. Demo software kontrol robot penjinak bom
Gambar3. Demo software kontrol robot penjinak bom

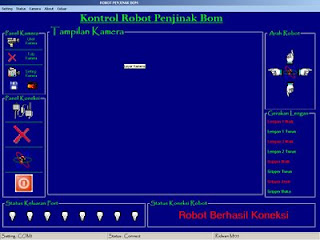
Gambar4. Demo software kontrol robot penjinak bom dengan CAM
Selain Program dengan Menggunakan Visual Basic juga digunakan pemrograman mikrokontroler dengan menggunakan IC AT89X51 atau keluarga dari MCS51. Disini digunakan dua bahasa pemrograman yaitu untuk kontrol mikro utama digunakan bahasa C dimana sinyal yang dilempar dari komputer melalui komunikasi serial akan dieksekusi ulang oleh mikro pada robot untuk menjalankan perintah dari komputer tersebut.

Gambar5. Pembuatan program mikrokontroller
Program yang tgelah dibuat lewat kompter di download kedalam Chip (IC AT89X51) dengan menggunakan Downloader DT-HiQ Programmer namun sebelumnya setiap program yang dibuat tersebut baik menggunakan bahasa Assembly ataupun bahasa pemrograman C keduanya harus dikompile agar menghasilkan bilangan HEX.
Dibawah ini dapat dilihat rangkaian elektronik yang dihubungkan dengan komunikasi serial untuk mengirim perintah dari komputer dengan menggunakan kabel komunikasi serial.

Gambar6. Rangkaina elektronik dengan wireless
yang dihubungkan dengan komputer untuk melempar sinyal ke robot

Gambar7. Rangkaina elektronik dengan wireless
yang dihubungkan dengan robot untuk menerima sinyal dari komputer
Gambar berikut merupaka gambar robot penjinak bom yang masih merupakan prototipe robot penjinak bom yang dikontrol secara manual. namun melihat dengan kontrol manual jarak yang bisa dijangkau tidaklah terlalu jauh sehingga dapat membahayakan operator. Dari sinilah kami mencoba untuk membuat dengan menggunakan kontrol jarak jauh agarkeamanan operator dapat terjaga.

Gambar8. Gambar robot penjinak bom dengan kontrol manual
Gambar dibawah ini merupakan disain dengan dimensi yang lebih besar yang rencananya akan dikontrol dengan menggunakan software kontrol jarakl jauh yang dilengkapi dengan kamera (CAM)

Gambar9. Robot penjinak bom dimensi besar yang sementara dalam pembuatan
source: KASKUS THE LOUNGE
Dibawah ini dapat dilihat gambaran dari kontrol robot penjinak bom yang menggunakan software dari Visual Basic 6.0

Gambar1. Disain pembutan software dengan VB.6.0
 Gambar2. Pembuatan source code kontrol dengan VB.6.0
Gambar2. Pembuatan source code kontrol dengan VB.6.0 Gambar3. Demo software kontrol robot penjinak bom
Gambar3. Demo software kontrol robot penjinak bom
Gambar4. Demo software kontrol robot penjinak bom dengan CAM
Selain Program dengan Menggunakan Visual Basic juga digunakan pemrograman mikrokontroler dengan menggunakan IC AT89X51 atau keluarga dari MCS51. Disini digunakan dua bahasa pemrograman yaitu untuk kontrol mikro utama digunakan bahasa C dimana sinyal yang dilempar dari komputer melalui komunikasi serial akan dieksekusi ulang oleh mikro pada robot untuk menjalankan perintah dari komputer tersebut.

Gambar5. Pembuatan program mikrokontroller
Program yang tgelah dibuat lewat kompter di download kedalam Chip (IC AT89X51) dengan menggunakan Downloader DT-HiQ Programmer namun sebelumnya setiap program yang dibuat tersebut baik menggunakan bahasa Assembly ataupun bahasa pemrograman C keduanya harus dikompile agar menghasilkan bilangan HEX.
Dibawah ini dapat dilihat rangkaian elektronik yang dihubungkan dengan komunikasi serial untuk mengirim perintah dari komputer dengan menggunakan kabel komunikasi serial.

Gambar6. Rangkaina elektronik dengan wireless
yang dihubungkan dengan komputer untuk melempar sinyal ke robot

Gambar7. Rangkaina elektronik dengan wireless
yang dihubungkan dengan robot untuk menerima sinyal dari komputer
Gambar berikut merupaka gambar robot penjinak bom yang masih merupakan prototipe robot penjinak bom yang dikontrol secara manual. namun melihat dengan kontrol manual jarak yang bisa dijangkau tidaklah terlalu jauh sehingga dapat membahayakan operator. Dari sinilah kami mencoba untuk membuat dengan menggunakan kontrol jarak jauh agarkeamanan operator dapat terjaga.

Gambar8. Gambar robot penjinak bom dengan kontrol manual
Gambar dibawah ini merupakan disain dengan dimensi yang lebih besar yang rencananya akan dikontrol dengan menggunakan software kontrol jarakl jauh yang dilengkapi dengan kamera (CAM)

Gambar9. Robot penjinak bom dimensi besar yang sementara dalam pembuatan
source: KASKUS THE LOUNGE




2 comments:
menarik informasinya
wah, ternyata begini buat programnya. ga nyangka gue
Posting Komentar